在ROS环境下利用激光雷达,设计一种环境识别系统。该环境识别系统使用激光雷达扫描由纸板构建的几何环境,通过ROS等工具估计所处环境的几何结构的形状,如图一所示。
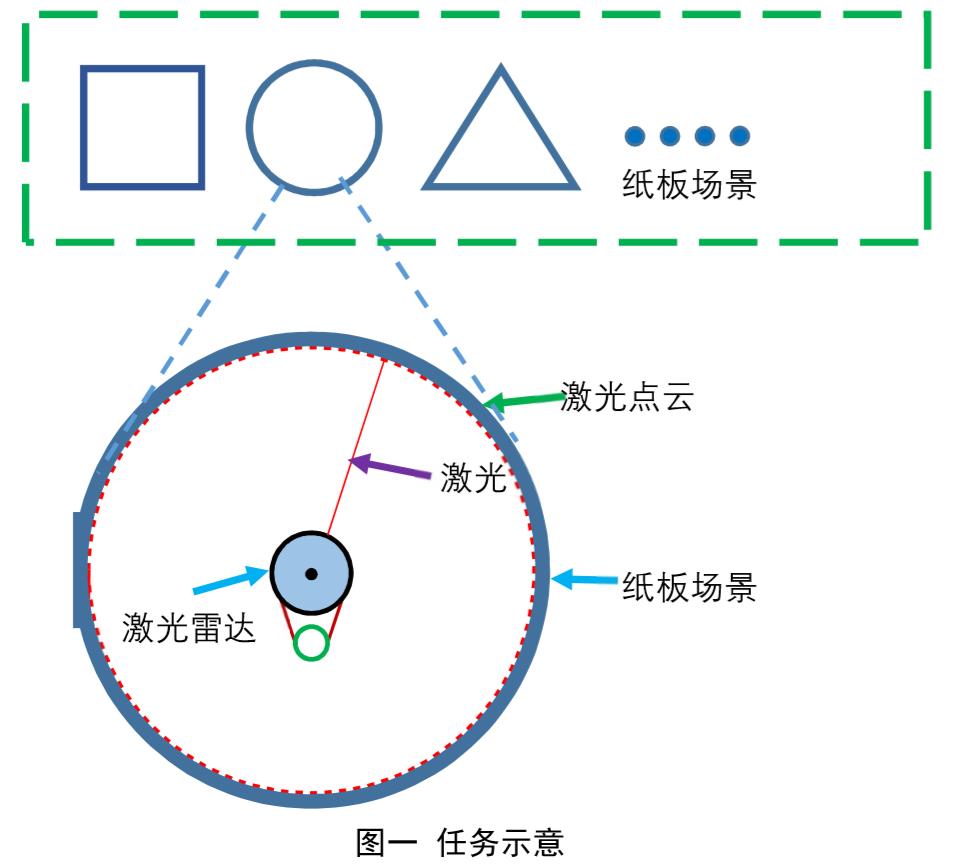
1. 基本要求 (1)激光雷达任意的置于图一所示任意的纸板场景中的任意一点(保证雷达点云基本完整),打开环境检测系统,在5s内给出所处环境的几何形状。 (2)激光雷达任意的置于图一所示任意的纸板场景中的任意一点(不保证雷达点云基本完整),打开环境检测系统,在5s内给出所处环境的几何形状。
2. 提高要求 (1)激光雷达任意的置于图一所示任意的纸板场景中的任意一点(不保证雷达点云基本完整),同时场景中有若干任意摆放的障碍物,打开环境检测系统,在5s内给出所处环境的几何形状。
本机器人竞赛要求ROS框架下进行算法设计和编程,让机器人完成特定的任务。 目的是激发暑期学校学员学习ROS的热情,提高学员对ROS框架和应用的理解, 促进暑期学校学员间的交流、协作和友谊。
丝绸之路是起始于古代中国连接亚洲、非洲和欧洲的古代商业贸易路线。 从运输方式上可分为陆上丝绸之路和海上丝绸之路。2013年9月和10月, 中国国家主席习近平分别提出建设“新丝绸之路经济带”和“21 世纪海上丝绸之路”的战略构想。 “一带一路”(One Belt One Road)正是“新丝绸之路经济带”和“21世纪海上丝绸之路”的简称。 陆上“新丝绸之路经济带”简称“一带”,是一条东、西方间在经济、政治、文化交流的主要通道。 “丝绸之路”最初的作用是运输中国古代出产的丝绸、瓷器等商品。“新丝绸之路经济带”连接亚太与欧洲地区, 中间经过的中亚地区,俄罗斯、哈萨克斯坦、吉尔吉斯斯坦、塔吉克斯坦和乌兹别克斯坦都在丝绸之路上。 “丝绸之路经济带”的核心区域包括西北的新疆、青海、甘肃、陕西、宁夏,西南的重庆、四川、 广西、云南、内蒙古。 “21世纪海上丝绸之路”简称“一路”,则是沿着海上丝绸之路, 发展中国和东南亚、南亚、中东、北非及欧洲各国的经济合作。

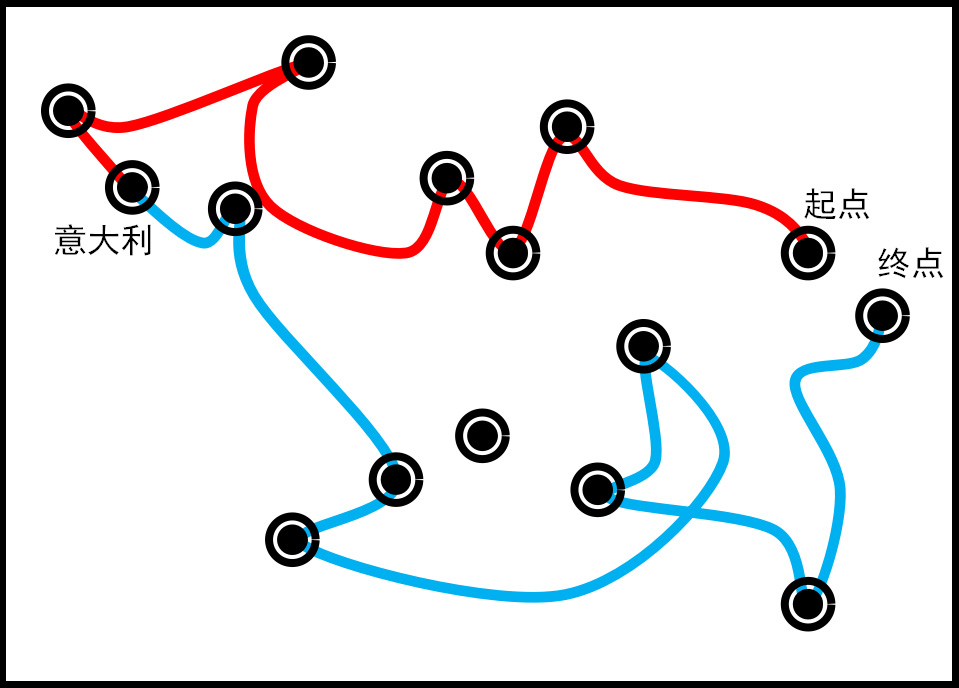
比赛场地尺寸为12米长8米宽的矩形区域。 从比赛场地上的起点(中国西安)出发,有一条5-8厘米宽的红色轨迹线沿“陆上丝绸之路” 一直延伸到欧洲的意大利。从意大利出发,一条5-8厘米宽的蓝色轨迹线沿“海上丝绸之路” 回到到终点(中国福州)。 下图是有可能出现的一种场地图形(该图仅供示例参考用,实际场地以比赛公布为准)。
机器人脱离轨迹,判为失误1次。失误时,机器人需从“起点”开始重新比赛,失误3次,则判为比赛失败。
以上设备由举办方提供(也可自带) 自带笔记本,自带手机。
赛前自行安装ROS、其它相关支持软件包和手机支持APP。ROS版本无要求。
本比赛采用计时排位赛,在规定时间内完成比赛者,以计时少者为优。
比赛顺序在赛前抽签决定。比赛中,上一队开始比赛时,会通知下一队候场准备。 在规定时间内没有准备好的参赛队将丧失本轮比赛机会。
竞赛期间,规则中如有未尽事项以本ROS暑期学校组委会现场公布为准。